在线练习
- LeetCode
- Virtual Judge
- CareerCup
- HackerRank
- CodeFights
- Kattis
- HackerEarth
- Codility
- Code Forces
- Code Chef
- Sphere Online Judge – SPOJ
在线编程面试
数据结构
链表
- 链表是一种由节点(Node)组成的线性数据集合,每个节点通过指针指向下一个节点。它是一种由节点组成,并能用于表示序列的数据结构。
- 单链表 :每个节点仅指向下一个节点,最后一个节点指向空(null)。
- 双链表 :每个节点有两个指针p,n。p指向前一个节点,n指向下一个节点;最后一个节点指向空。
- 循环链表 :每个节点指向下一个节点,最后一个节点指向第一个节点。
- 时间复杂度:
- 索引:O(n)
- 查找:O(n)
- 插入:O(1)
- 删除:O(1)
栈
- 栈是一个元素集合,支持两个基本操作:push用于将元素压入栈,pop用于删除栈顶元素。
- 后进先出的数据结构(Last In First Out, LIFO)
- 时间复杂度
- 索引:O(n)
- 查找:O(n)
- 插入:O(1)
- 删除:O(1)
队列
- 队列是一个元素集合,支持两种基本操作:enqueue 用于添加一个元素到队列,dequeue 用于删除队列中的一个元素。
- 先进先出的数据结构(First In First Out, FIFO)。
- 时间复杂度
- 索引:O(n)
- 查找:O(n)
- 插入:O(1)
- 删除:O(1)
树
- 树是无向、联通的无环图。
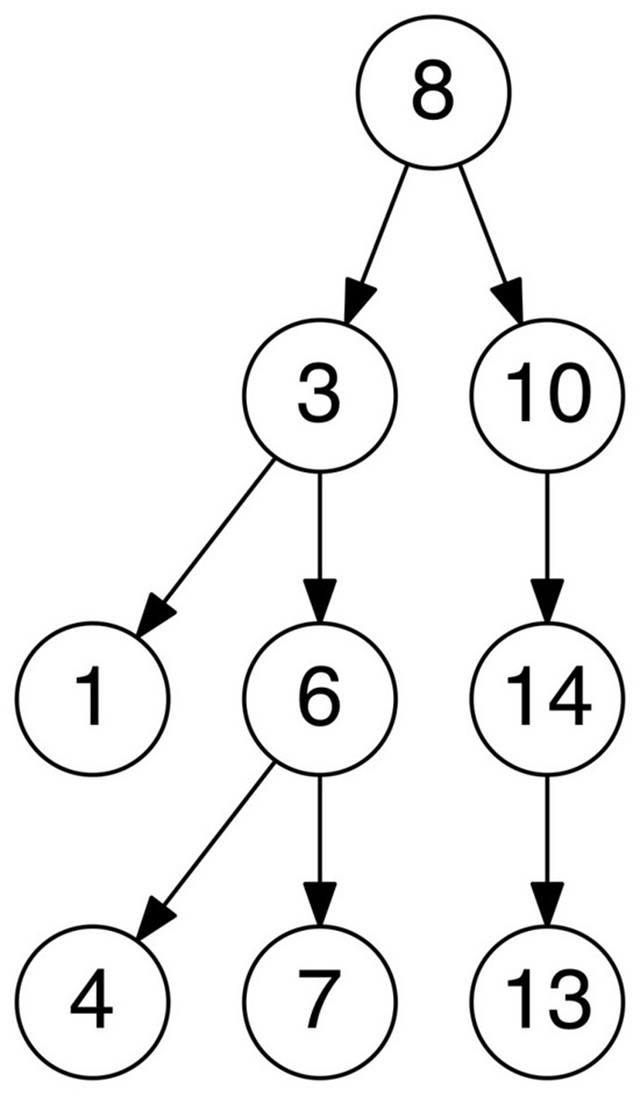
二叉树
- 二叉树是一个树形数据结构,每个节点最多可以有两个子节点,称为左子节点和右子节点。
- 满二叉树(Full Tree) :二叉树中的每个节点有 0 或者 2 个子节点。

- 完美二叉树(Perfect Binary) :二叉树中的每个节点有两个子节点,并且所有的叶子节点的深度是一样的。
- 完全二叉树 :二叉树中除最后一层外其他各层的节点数均达到最大值,最后一层的节点都连续集中在最左边。
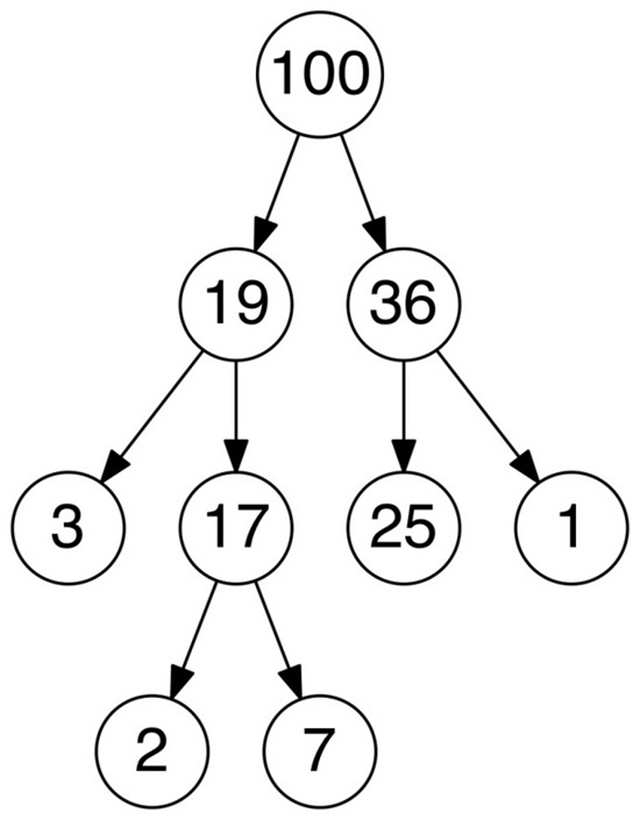
二叉查找树
- 二叉查找树(BST)是一种二叉树。其任何节点的值都大于等于左子树中的值,小于等于右子树中的值。
- 时间复杂度
- 索引:O(log(n))
- 查找:O(log(n))
- 插入:O(log(n))
- 删除:O(log(n))
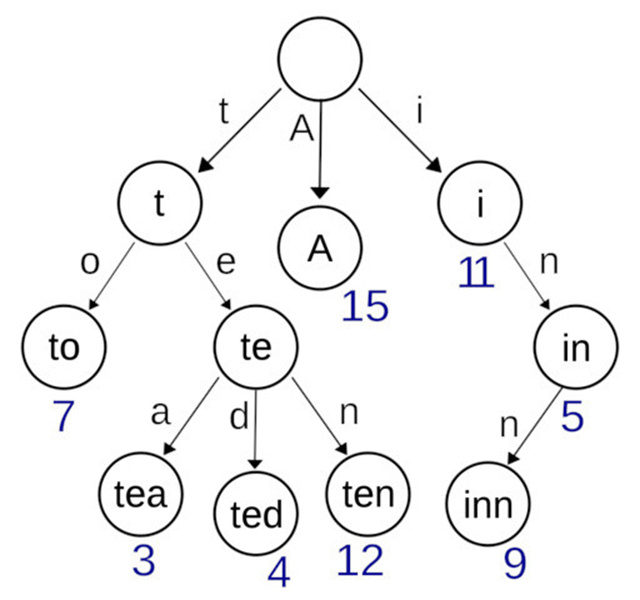
字典树
- 字典树,又称为基数树或前缀树,是一种用于存储键值为字符串的动态集合或关联数组的查找树。树中的节点并不直接存储关联键值,而是该节点在树中的位置决定了其关联键值。一个节点的所有子节点都有相同的前缀,根节点则是空字符串。
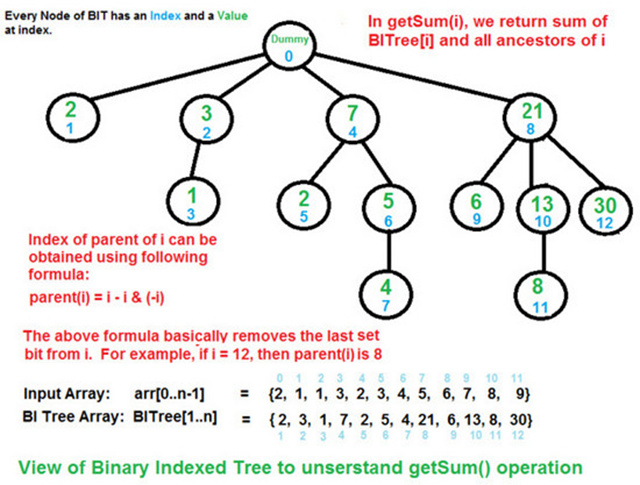
树状数组
- 树状数组,又称为二进制索引树(Binary Indexed Tree,BIT),其概念上是树,但以数组实现。数组中的下标代表树中的节点,每个节点的父节点或子节点的下标可以通过位运算获得。数组中的每个元素都包含了预计算的区间值之和,在整个树更新的过程中,这些计算的值也同样会被更新。
- 时间复杂度
- 区间求和:O(log(n))
- 更新:O(log(n))
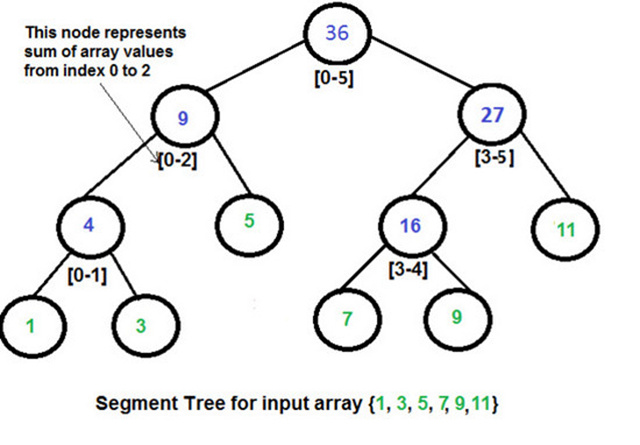
线段树
- 线段树是用于存储区间和线段的树形数据结构。它允许查找一个节点在若干条线段中出现的次数。
- 时间复杂度
- 区间查找:O(log(n))
- 更新:O(log(n))
堆
- 堆是一种基于树的满足某些特性的数据结构:整个堆中的所有父子节点的键值都满足相同的排序条件。堆分为最大堆和最小堆。在最大堆中,父节点的键值永远大于等于所有子节点的键值,根节点的键值是最大的。最小堆中,父节点的键值永远小于等于所有子节点的键值,根节点的键值是最小的。
- 时间复杂度
- 索引:O(log(n))
- 查找:O(log(n))
- 插入:O(log(n))
- 删除:O(log(n))
- 删除最大值/最小值:O(1)
哈希
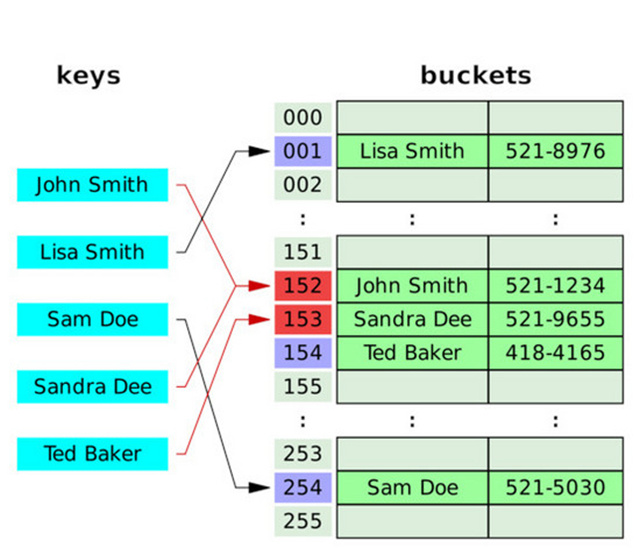
- 哈希用于将任意长度的数据映射到固定长度的数据。哈希函数的返回值被称为哈希值、哈希码或者哈希。如果不同的主键得到相同的哈希值,则发生了冲突。
- Hash Map : hash map 是一个存储键值间关系的数据结构。HashMap 通过哈希函数将键转化为桶或者槽中的下标,从而便于指定值的查找。
- 冲突解决
- 链地址法( Separate Chaining ) :在链地址法中,每个桶(bucket)是相互独立的,每一个索引对应一个元素列表。处理HashMap 的时间就是查找桶的时间(常量)与遍历列表元素的时间之和。
- 开放地址法( Open Addressing ) :在开放地址方法中,当插入新值时,会判断该值对应的哈希桶是否存在,如果存在则根据某种算法依次选择下一个可能的位置,直到找到一个未被占用的地址。开放地址即某个元素的位置并不永远由其哈希值决定。
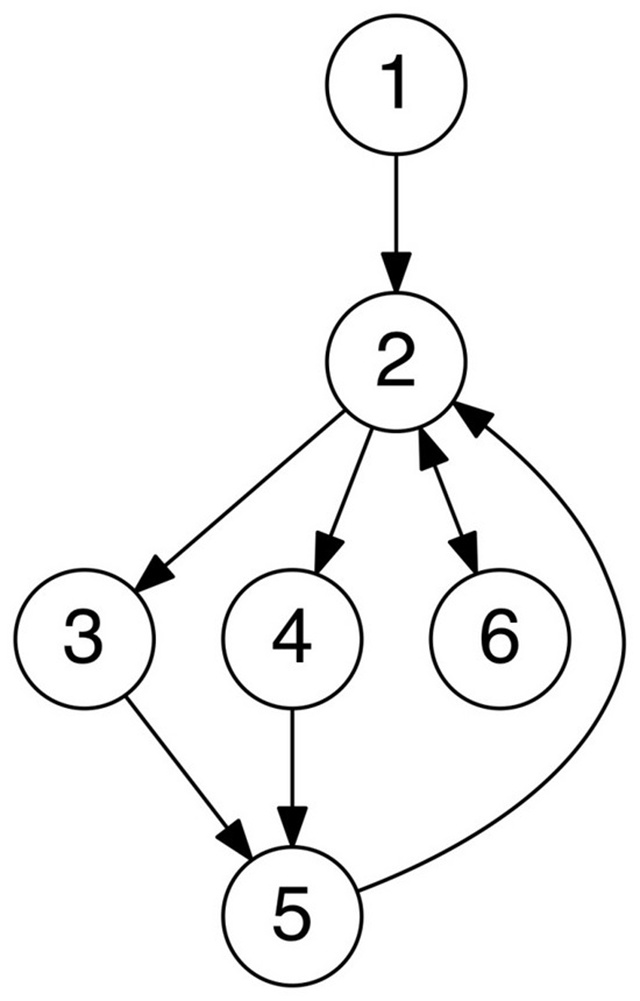
图
- 图是G =(V,E)的有序对,其包括顶点或节点的集合 V 以及边或弧的集合E,其中E包括了两个来自V的元素(即边与两个顶点相关联 ,并且该关联为这两个顶点的无序对)。
- 无向图 :图的邻接矩阵是对称的,因此如果存在节点 u 到节点 v 的边,那节点 v 到节点 u 的边也一定存在。
- 有向图 :图的邻接矩阵不是对称的。因此如果存在节点 u 到节点 v 的边并不意味着一定存在节点 v 到节点 u 的边。
算法
排序
快速排序
- 稳定:否
- 时间复杂度
- 最优:O(nlog(n))
- 最差:O(n^2)
- 平均:O(nlog(n))
合并排序
- 合并排序是一种分治算法。这个算法不断地将一个数组分为两部分,分别对左子数组和右子数组排序,然后将两个数组合并为新的有序数组。
- 稳定:是
- 时间复杂度:
- 最优:O(nlog(n))
- 最差:O(nlog(n))
- 平均:O(nlog(n))
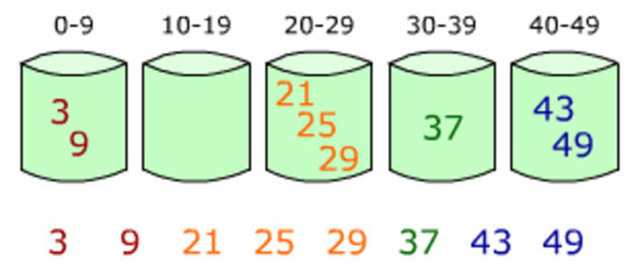
桶排序
- 桶排序是一种将元素分到一定数量的桶中的排序算法。每个桶内部采用其他算法排序,或递归调用桶排序。
- 时间复杂度
- 最优:Ω(n + k)
- 最差: O(n^2)
- 平均:Θ(n + k)
基数排序
- 基数排序类似于桶排序,将元素分发到一定数目的桶中。不同的是,基数排序在分割元素之后没有让每个桶单独进行排序,而是直接做了合并操作。
- 时间复杂度
- 最优:Ω(nk)
- 最差: O(nk)
- 平均:Θ(nk)
图算法
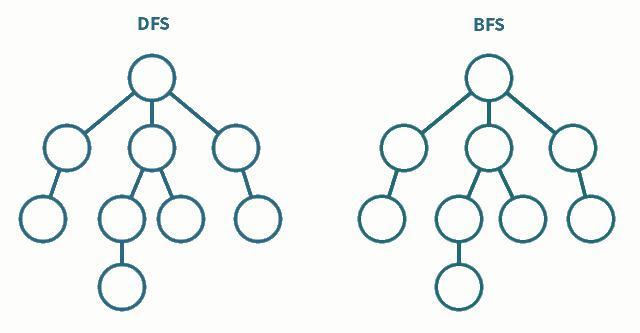
深度优先 搜索
- 深度优先搜索是一种先遍历子节点而不回溯的图遍历算法。
- 时间复杂度:O(|V| + |E|)
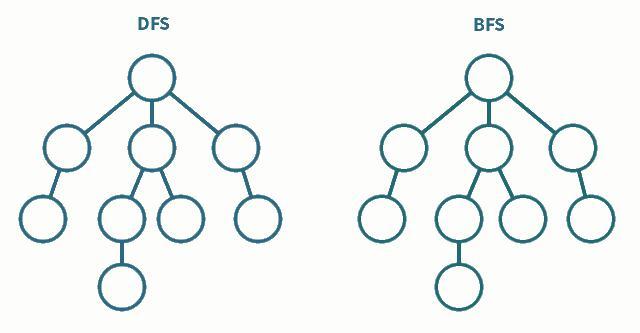
广度优先 搜索
- 广度优先搜索是一种先遍历邻居节点而不是子节点的图遍历算法。
- 时间复杂度:O(|V| + |E|)
拓扑排序
- 拓扑排序是有向图节点的线性排序。对于任何一条节点 u 到节点 v 的边,u 的下标先于 v。
- 时间复杂度:O(|V| + |E|)
Dijkstra算法
- Dijkstra 算法是一种在有向图中查找单源最短路径的算法。
- 时间复杂度:O(|V|^2)
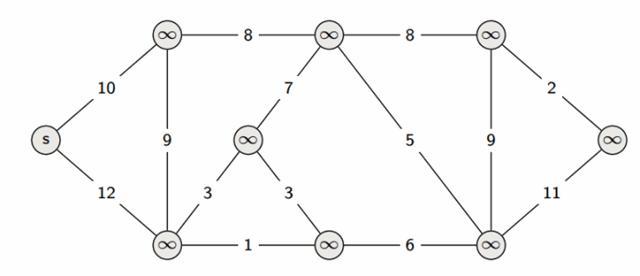
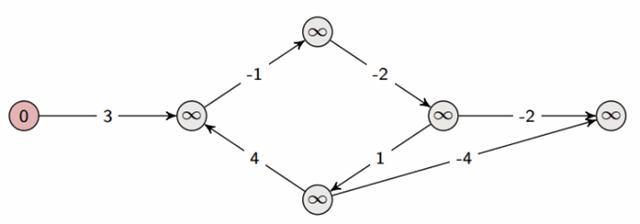
Bellman-Ford算法
- _Bellman-Ford _ 是一种在带权图中查找单一源点到其他节点最短路径的算法。
- 虽然时间复杂度大于 Dijkstra 算法,但它可以处理包含了负值边的图。
- 时间复杂度:
- 最优:O(|E|)
- 最差:O(|V||E|)
Floyd-Warshall 算法
- _Floyd-Warshall _ 算法是一种在无环带权图中寻找任意节点间最短路径的算法。
- 该算法执行一次即可找到所有节点间的最短路径(路径权重和)。
- 时间复杂度:
- 最优:O(|V|^3)
- 最差:O(|V|^3)
- 平均:O(|V|^3)
最小生成树算法
- 最小生成树算法是一种在无向带权图中查找最小生成树的贪心算法。换言之,最小生成树算法能在一个图中找到连接所有节点的边的最小子集。
- 时间复杂度:O(|V|^2)
Kruskal 算法
- _Kruskal _ 算法也是一个计算最小生成树的贪心算法,但在 Kruskal 算法中,图不一定是连通的。
- 时间复杂度:O(|E|log|V|)
贪心算法
- 贪心算法总是做出在当前看来最优的选择,并希望最后整体也是最优的。
- 使用贪心算法可以解决的问题必须具有如下两种特性:
- 最优子结构
- 问题的最优解包含其子问题的最优解。
- 贪心选择
- 每一步的贪心选择可以得到问题的整体最优解。
- 最优子结构
- 实例-硬币选择问题
- 给定期望的硬币总和为 V 分,以及 n 种硬币,即类型是 i 的硬币共有 coinValue[i] 分,i的范围是 [0…n – 1]。假设每种类型的硬币都有无限个,求解为使和为 V 分最少需要多少硬币?
- 硬币:便士(1美分),镍(5美分),一角(10美分),四分之一(25美分)。
- 假设总和 V 为41,。我们可以使用贪心算法查找小于或者等于 V 的面值最大的硬币,然后从 V 中减掉该硬币的值,如此重复进行。
- V = 41 | 使用了0个硬币
- V = 16 | 使用了1个硬币(41 – 25 = 16)
- V = 6 | 使用了2个硬币(16 – 10 = 6)
- V = 1 | 使用了3个硬币(6 – 5 = 1)
- V = 0 | 使用了4个硬币(1 – 1 = 0)
位 运算
- 位运算即在比特级别进行操作的技术。使用位运算技术可以带来更快的运行速度与更小的内存使用。
- 测试第 k 位:s & (1 << k);
- 设置第k位:s |= (1 << k);
- 关闭第k位:s &= ~(1 << k);
- 切换第k位:s ^= (1 << k);
- 乘以2n:s << n;
- 除以2n:s >> n;
- 交集:s & t;
- 并集:s | t;
- 减法:s & ~t;
- 提取最小非0位:s & (-s);
- 提取最小0位:~s & (s + 1);
- 交换值:x ^= y; y ^= x; x ^= y;
运行时分析
大 O 表示
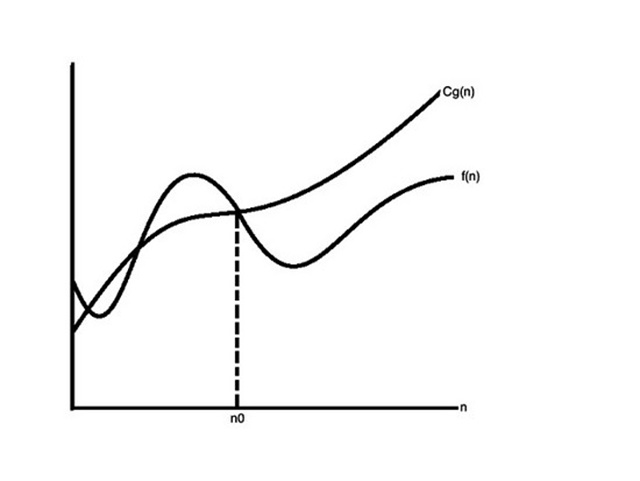
- 大 O 表示用于表示某个算法的上界,用于描述最坏的情况。
小 O 表示
- 小 O 表示用于描述某个算法的渐进上界,二者逐渐趋近。
大 Ω 表示
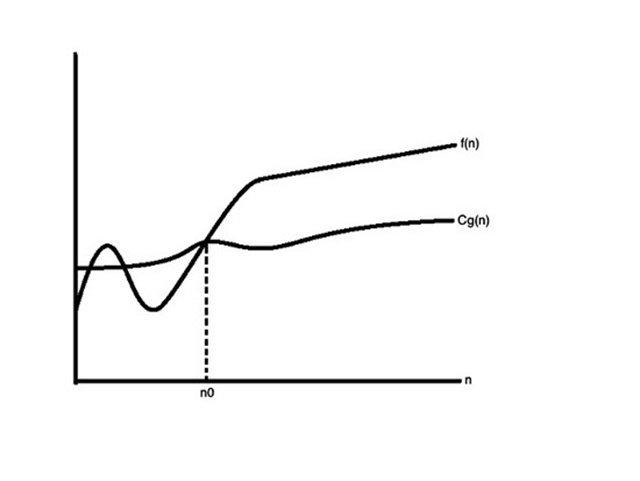
- 大 Ω 表示用于描述某个算法的渐进下界。
小 ω 表示
- 小 ω 表示用于描述某个算法的渐进下界,二者逐渐趋近。
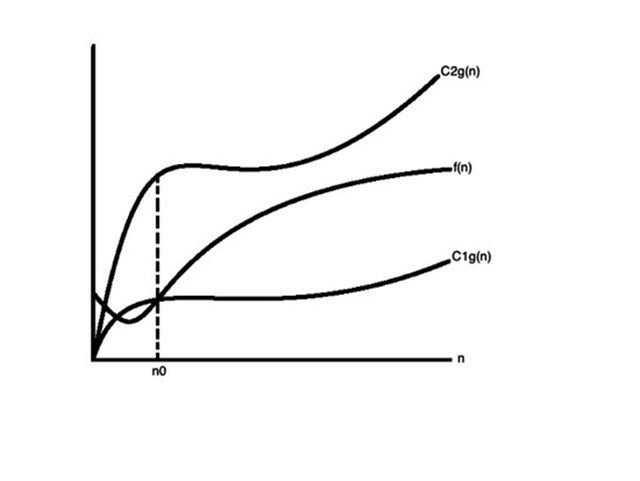
Theta Θ 表示
- Theta Θ 表示用于描述某个算法的确界,包括最小上界和最大下界。
视频教程
- 数据结构
- 算法